MVIG-RHOS招新
各位同学大家好!
我是李永露(长聘教轨助理教授,博导),感谢关注RHOS实验室,RHOS隶属于上海交大 & 上海创智学院,我的基本情况如下:
- •在人工智能领域发表论文50余篇(NeurIPS, ICML, ICLR, CVPR, ICCV, ECCV, ICRA, TPAMI, etc);
- •获ICRA 2025 Best Paper Award on HRI(独立通讯,当年大陆唯一);
- •开发了开源系统HAKE,探索以知识驱动的推理方式理解人类行为,其官网得到全球十几万次访问;
- •NeurIPS/ICLR Area Chair,获蚂蚁Intech奖、AI100青年先锋(麻省理工评论)、NeurIPS杰出审稿人(2020、2021)、百度奖学金、WAIC云帆奖(明日之星、璀璨明星)、吴文俊奖优博(中国人工智能学会)、上海市优秀毕业生、2020华人学生AI百人(机器学习top-10)、上交85-杨元庆基金优秀博士等。
实验室简介
我们的目标是做出类似C-3PO和R2-D2的智能(真实/模拟)机器人。实验室的研究方向包括:
- 1. 具身智能:如何让机器人学习人类的技能并与人类交互?
a. 智能机器人:以AI技术为驱动的机器人研究;
b. 视觉与物理推理: 如何从人类行为、物理现象中挖掘、捕获和编码逻辑、因果关系;
c. 通用多模态基础模型:e2e具身大模型VLA、以人为中心的感知与理解等;
a. 人类行为理解:如何从多模态信息(2D-3D-4D)中学习和理解复杂、模糊的人类行为(身体运动,人-物体/人/场景 交互)和物体概念;
- 2. 人机交互(如:智能医院):与上海交通大学的医疗团队(医生和工程师)合作,开发辅助人类的机器人。
我们有非常高水平的博士/硕士团队,以及具有浓厚科研兴趣的实习生(数据截至2025.9):
● 20+同学曾是交大本科所在系前五名;
● 12名本科实习生以一作发表顶会(CVPR、ECCV、NeurIPS);
● 50+本科实习生以co-author发表顶会/顶刊(TPAMI、CVPR、NeurIPS、ECCV、ICCV);
● 5名本科实习生前往Stanford, UCB,MIT等北美四大暑研、深造(硕博);
● 2名本科实习生获得商汤奖学金(全国25人/年),2名同学获得上海市明日科技之星,3名同学获85届上交cs-杨元庆奖学金,3名同学获叶军沈南鹏致远杰出奖学金;
● 5名同学获得上海市优秀毕业生,1名同学入选CCF优秀大学生启航计划;
● 实验室成员来自(不分先后):上交、清华、复旦、同济、上科、西湖、华科、西工大、北邮、中科院、中科大、天大、苏大;UCB、UCL、帝国理工、剑桥、伦斯勒理工、深大、etc;
● 实验室成员专业背景(不分先后):ACM班、CS、AI、机械、物理、数学、医学、软工、信安、自动化、电气、统计、力学、etc。
我们追求自由与理性,努力营造团结、紧张、严肃、活泼的研究氛围:
● 每周组会有一对一和小组讨论两种形式,根据实际需求进行。
● 论文方面,我们追求顶级机器学习、计算机视觉、机器人方向的会议和期刊(如ICLR、 NeurlPS、ICML、CVPR、ICCV、ECCV、ICRA、CoRL、RSS、TPAMI、IJRR, T-RO等)。
● 与工业届有密切的合作,积极推动我们的研究工作落地应用,也可以推荐实习生前往人工智能和机器人的工业界团队(如腾讯、华为、快手、商汤、非夕等)实习。
● 足够的研究资金和硬件设施(50张4090级 GPUs,30张A100/H100级别GPUs、机器人、VR设备等)。
招生
实验室每年会招收多名博士生及硕士生(上海交通大学、上海创智学院),同时长期招收实习生(本硕博均有)。 英语水平、科研经历、代码能力和深度学习基础将会是你的加分项,但不是必需项。 只要你有强烈的自驱力和科研兴趣,能展示出有价值的科学研究潜力或优秀工程技能,欢迎加入我们!
本科生培养
我们致力于“world-class research, world-class students”,给学生予充分的指导。我们的培养分为四个阶段:
● Stage-0: 培训掌握基本算法和技术,包括深度学习/机器人基础课程的学习、基础工具的学习等。 可参见Research_in_RHOS。
● Stage-1: 参与研究课题,在老师和高年级学生的带领下,发表一篇co-author论文,体验完整的研究过程: 好奇心--问题--思考--验证实验--动机--洞察力--反复试验--写论文--提交论文--如果不幸拒稿修改后recycle--准备最终版--发表论文--参加会议。
● Stage-2: 提出一个好的问题,在指导下每周推进,独立发表一作顶会论文。
● Stage-3: 提出一个高水平的idea,独立进行研究,与老师同学们互相学习。
未来发展
● 保研/直博:实习期间表现优异的同学优先保研,目前实验室研究生大部分来自本科实习生。 若实习期内表现突出且能够获得推免资格,实验室会竭尽全力为大家提供组内的保研机会。
● 出国申请:每年实验室会帮助很多实习生同学准备申请工作, 包括科研训练、申请材料准备、暑研学校选择、北美导师选择、推荐信等, 实验室也已有很多同学去Stanford、MIT、CMU等北美名校的人工智能和机器人实验室暑研、读博。
我们的工作
Robot Brain
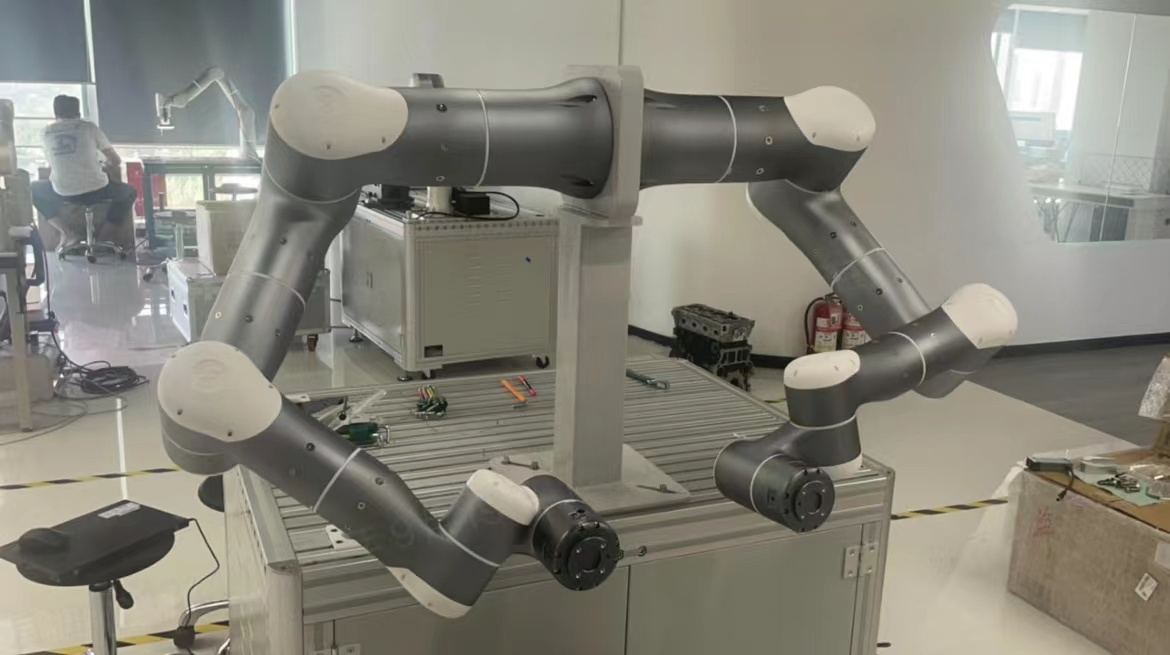
从数据和任务端重新定义具身智能学习的范式, 在有限、多模态、noisy、异构数据的条件下, 研究可泛化、可解释且具有推理能力的机器人“大脑”,与现有技术配合实现智能机器人应用。 其中,人-机器人协同学习工作获得ICRA 2025 Best Paper Award on HRI。



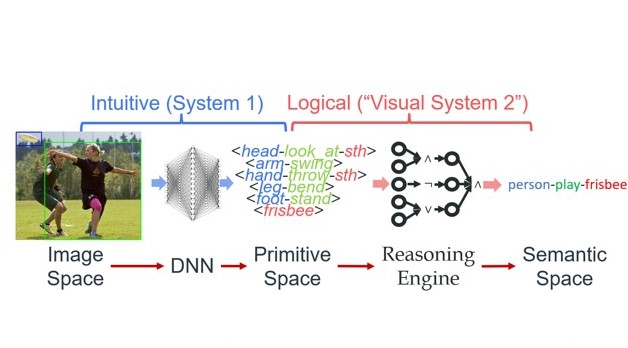
HAKE
推理驱动的人类行为知识系统:使智能体能够感知人类行为、推理人类行为逻辑、从人类行为中学习技能,并与物体和环境进行交互。

OCL
物体概念学习:提出涉及物体属性、可供性等与人类行为紧密相关的物体概念, 以推动机器对物体的理解,并基于因果图模型提出了因果推理基准和基线模型。
Full demo on BiliBiliPangea
根据动词分类层次结构设计了动作语义空间,涵盖了大量人类行为,从而将多模态数据集聚合到一个统一的数据池中, 使用统一的标签系统。相应地,提出了一个在物理空间和语义空间之间进行双向映射的模型,以促进行为理解领域的“统一度量衡”。
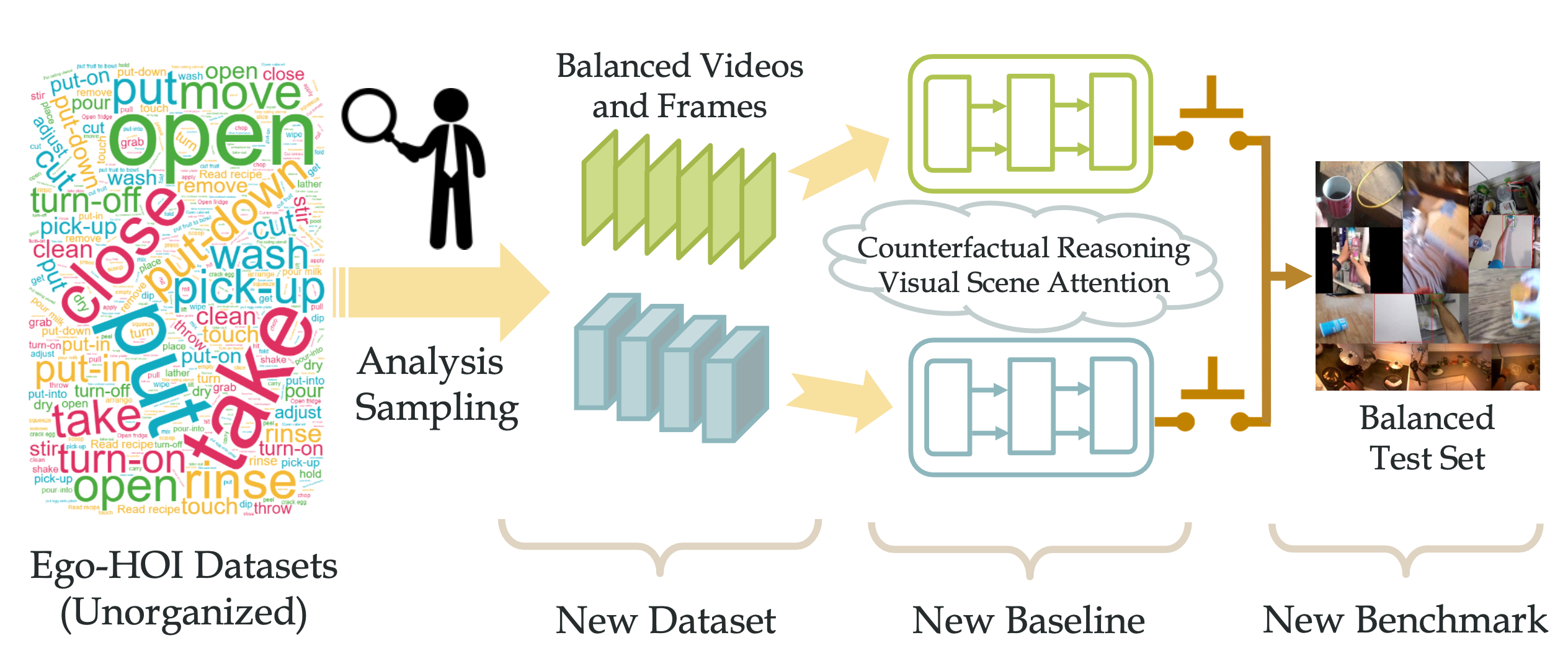
EgoPCA
提出了一个全新的手-物体交互理解框架,通过对手-物体交互数据的探测、分析和重采样, 提供了更平衡而全面的预训练集、测试集和测试基准,并使用专门针对手-物体交互的预训练策略以及下游微调有效机制, 推动手-物交互理解的发展,以助力机器人物体操作技能学习。